Amelia-TF: A Large Model for Airport Surface Movement Forecasting
Predictive models for airport surface operations can be used for various downstream tasks like collision risk assessment, taxi-out time prediction, departure metering, and emission estimations. While data-driven methods have showcased marked improvements in predictive performance in recent years, prior works have not addressed the lack of large-scale curated surface movement datasets within the public domain and the development of generalizable trajectory forecasting models.
In response to this, we introduce Amelia-TF is a large transformer-based airport surface movement trajectory forecasting model trained on the Amelia-42 dataset. We explore different scene representation and training strategies for our model varying from single-airport to multi-airport settings in which we assess our model’s generalization capabilities.
Amelia-TF predicting aircraft future motions at San Francisco International Airport
Below, we provide an overview of our model and experiments. For more details, please check out our paper!
Model Overview
Amelia-TF is an end-to-end motion prediction model that aims to characterize relevant surface area operations. To do so, our model comprises three main submodules:
- A scene representation module that determines the agents of interest in the scene using a scoring strategy, and encodes per-agent features,
- A transformer-based scene encoder, which hierarchically encodes the temporal, agent-to-agent and agent-to-context relationships within a scene, and;
- A trajectory decoder that models the set of possible futures with associated confidence scores using a Gaussian Mixture Model.
Experiments and Results
We explored two main experiments to assess the performance of Amelia-TF. The first experiment studies the benefit of our proposed scene representation strategy. The second experiment explores the generalization of our model across airports.
Ego-selection strategy
We want to assess if our ego-selection strategy produces complex and interesting scene representations since it prioritizes more critical agent-to-agent relationships and more dynamic agent motion profiles within a scene.
To do so we compare our proposed idea against a random agent selection strategy.
Quantitative Results
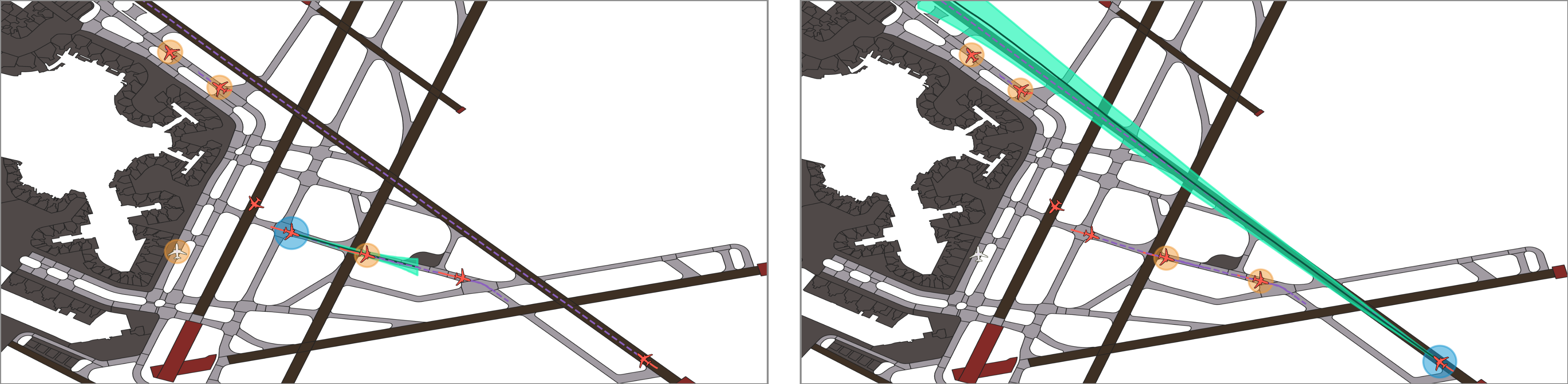
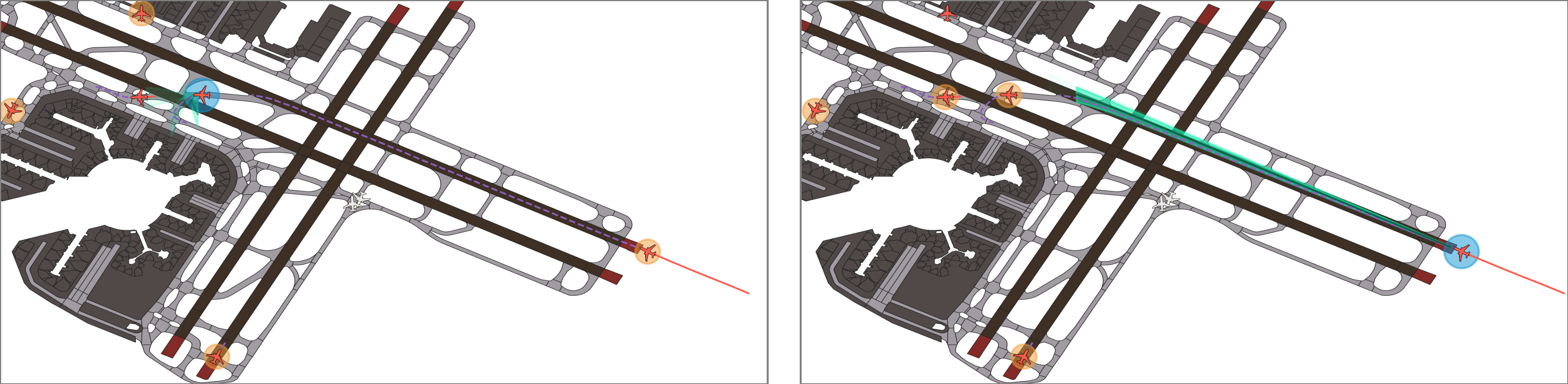
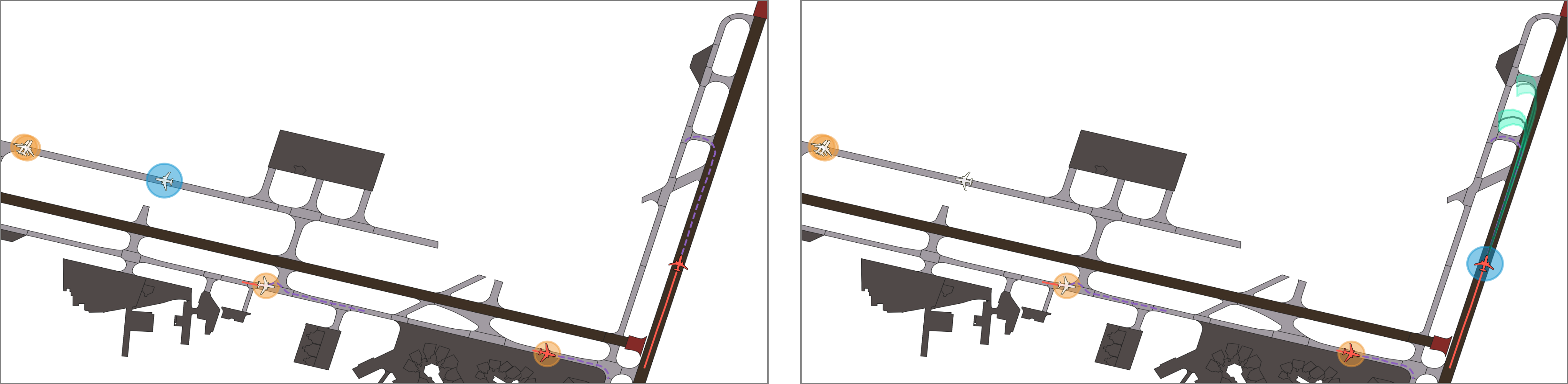
Qualitative Results
| Random Ego-agent Selection Strategy | Critical Ego-agent Selection Strategy |
Multi-Airport generalization
We also explore our model’s generalization capabilities as we cover a wider variety of training data. We hypothesize that as we do so, our model will learn richer representations that would generalize better to unseen airport layouts and interactions.
This would eventually reduce the requirement for more training data and/or adaptation techniques, such as fine-tuning. Thus, we propose a multi-airport ablation to assess Amelia-TF’s performance in unseen airports as we vary the number of seen ones during training.
Quantitative Results
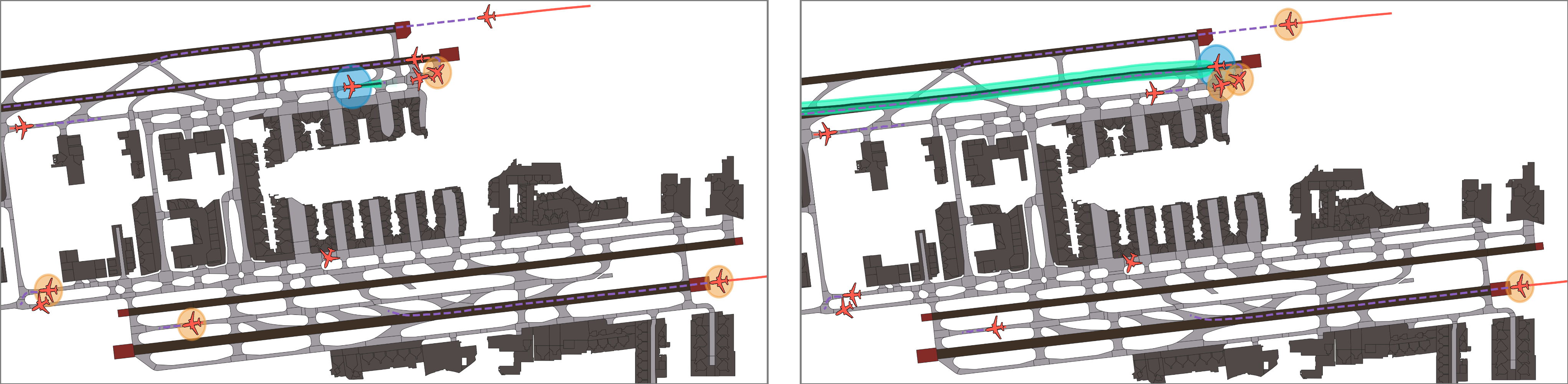
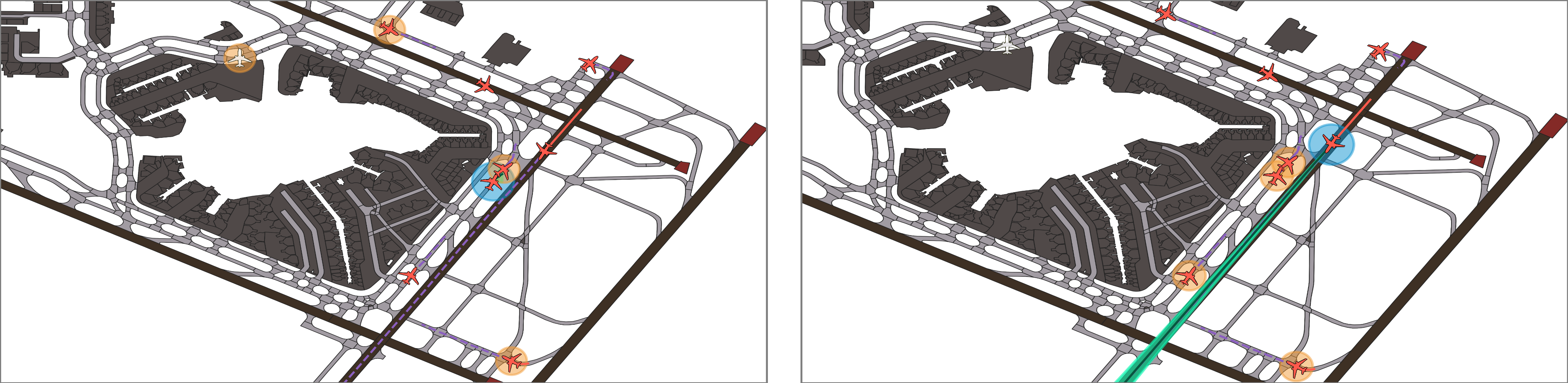
Qualitative Results
| Seen Airports | Unseen Airports |
BibTeX
If you find our work useful in your research, please cite us!
@inbook{navarro2024amelia,
author = {Ingrid Navarro and Pablo Ortega and Jay Patrikar and Haichuan Wang and Zelin Ye and Jong Hoon Park and Jean Oh and Sebastian Scherer},
title = {AmeliaTF: A Large Model and Dataset for Airport Surface Movement Forecasting},
booktitle = {AIAA AVIATION FORUM AND ASCEND 2024},
chapter = {},
pages = {},
doi = {10.2514/6.2024-4251},
URL = {https://arc.aiaa.org/doi/abs/10.2514/6.2024-4251},
eprint = {https://arc.aiaa.org/doi/pdf/10.2514/6.2024-4251},
}